
3D BAT: A Semi-Automatic, Web-based 3D Annotation Toolbox for Full-Surround, Multi-Modal Data Streams
Published in IEEE Intelligent Vehicles Symposium, 2019
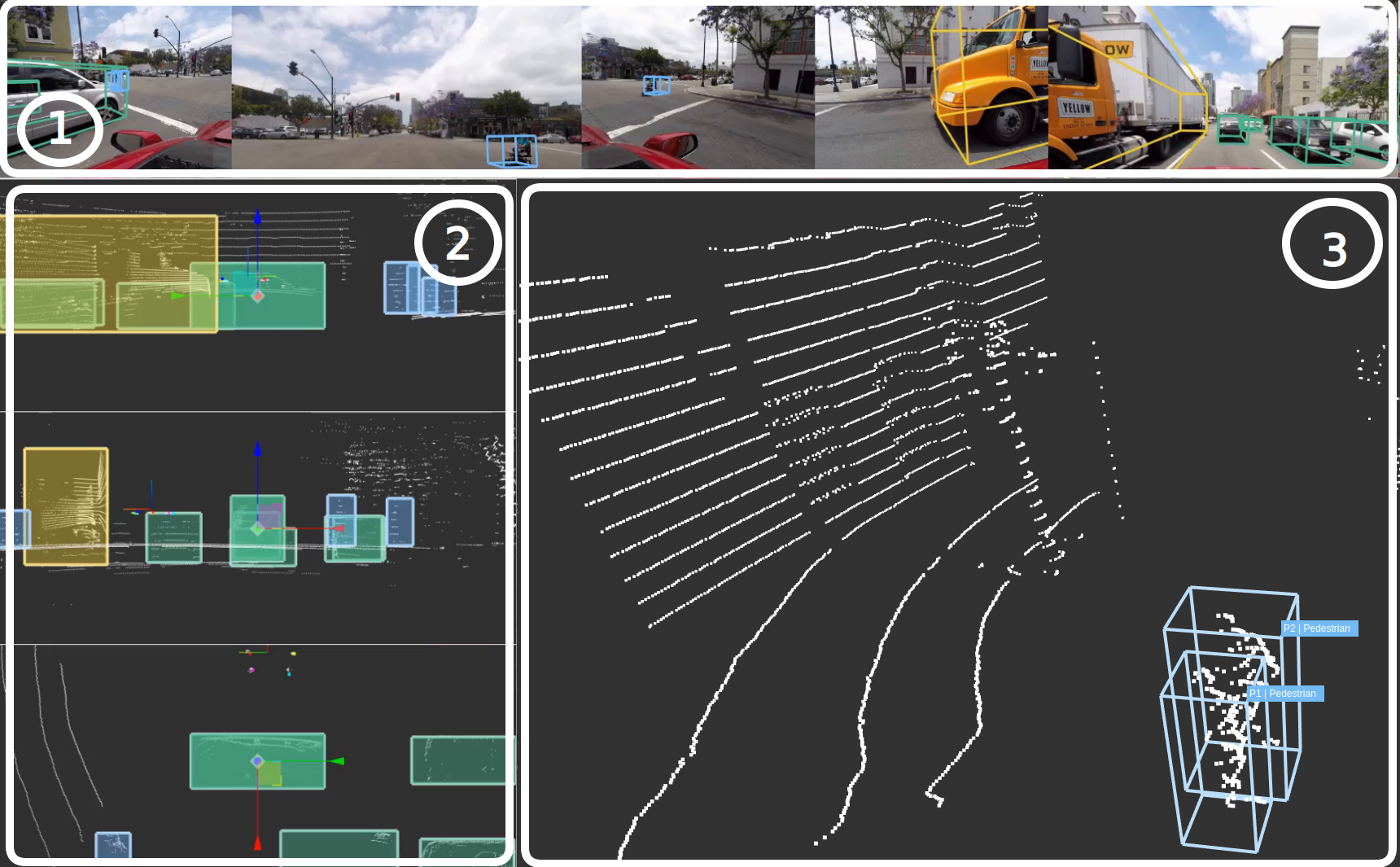
In this paper, we focus on obtaining 2D and 3D labels, as well as track IDs for objects on the road with the help of a novel 3D Bounding Box Annotation Toolbox (3D BAT). Our open source, web-based 3D BAT incorporates several smart features to improve usability and efficiency. For instance, this annotation toolbox supports semi-automatic labeling of tracks using interpolation, which is vital for downstream tasks like tracking, motion planning and motion prediction. Moreover, annotations for all camera images are automatically obtained by projecting annotations from 3D space into the image domain. In addition to the raw image and point cloud feeds, a Masterview consisting of the top view (bird’s-eye-view), side view and front views is made available to observe objects of interest from different perspectives. Comparisons of our method with other publicly available annotation tools reveal that 3D annotations can be obtained faster and more efficiently by using our toolbox.